Modificación de propiedades de fotografías y colecciones de fotografías
Los datos de las fotografías se pueden ver y modificar en la hoja de propiedades de la colección de fotografías y en la lista de fotografías. La información que se muestra en la hoja de propiedades se refiere a la colección que está actualmente seleccionada en la lista de colecciones, mientras que la información en la lista de fotos es específica de cada foto.
La información sobre las colecciones de fotografías y las fotografías (por ejemplo, sistema de coordenadas, ancho del sensor, distancia focal, información de posición de la fotografía) generalmente se lee desde un archivo Excel o XML cargado que incluye esta información. Estos parámetros luego se pueden ajustar en la hoja de propiedades de la colección y en la lista de fotografías.
Las propiedades se pueden editar incluso después de la aerotriangulación, hasta que comience el paso de reconstrucción. Durante la reconstrucción, si se realizó algún cambio en las propiedades de la fotografía/colección, la construcción se reinicia desde la aerotriangulación previa.
Para mostrar y modificar las propiedades de la colección de fotografías:
1. En la sección Árbol del proyecto, Haga click en el botón Galería de fotos grupo.
2. En la hoja de propiedades de la colección, modifique los valores de propiedad según sea necesario. See "Hoja de propiedades de colección" en este capítulo para obtener más información.
Para mostrar y modificar las propiedades de la fotografía:
1. En la sección Árbol del proyecto, Haga click en el botón Galería de fotos grupo.
2. En la sección Galería de fotos lista, seleccione las fotos requeridas y modifique sus propiedades según sea necesario. See "Lista de Fotos" en este capítulo para obtener información.
Nota: También puede buscar en la lista las fotos requeridas. See "Seleccionar artículos usando la lista de artículos" en el capítulo "Conceptos básicos" para obtener información.
Hoja de propiedades de colección
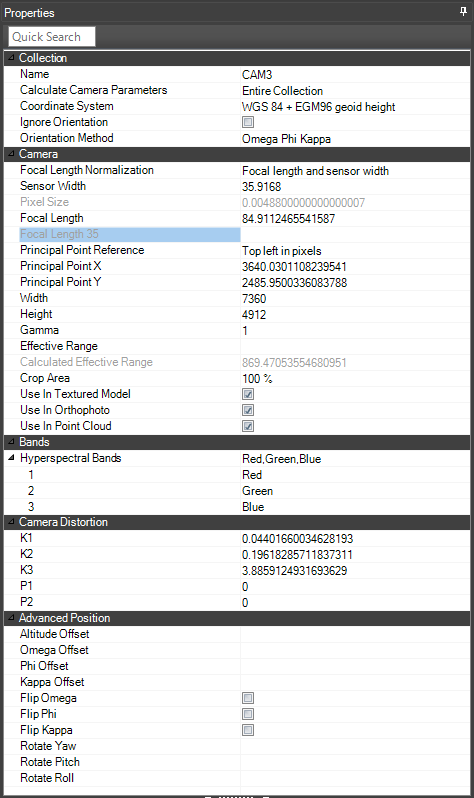
Nota: Si falta una o más de las propiedades de la cámara que se utilizan para establecer la distancia focal (estas propiedades varían según la configuración de la propiedad Normalización de longitud focal establecida en la hoja de propiedades de la Colección), aparecerá un signo de interrogación naranja. ![]() se muestra al lado de la propiedad.
se muestra al lado de la propiedad.
|
Propiedad |
Descripción |
|
Colecciones |
|
|
Nombre |
Nombre de la colección en la lista de Fotos. |
|
Sistema coordinado |
Sistema de coordenadas de la colección. Haga clic en Seleccionar |
|
Orientación Método |
Seleccione qué sistema usar para establecer la orientación: OPK (Omega, Phi, Kappa) o YPR (Guía, Cabeceo y Rollo). Esta selección determina qué campos se muestran en la sección Posición avanzada de la hoja de propiedades. |
|
Tipo de altitud |
Cuando se proporcionaron datos de altitud relativa y absoluta, esta propiedad establece el método de altitud que utilizará la colección. Seleccionar Relativo al terreno colocar la colección a una altitud específica sobre el suelo. Seleccionar Absoluto para colocar la colección a una altitud especificada sobre el elipsoide de base de referencia vertical de la base de datos del terreno. |
|
Altitud relativa |
Si se seleccionó "Relativa" como tipo de altitud, esto define la altitud sobre el suelo. |
|
Cámara |
|
|
Normalización de la distancia focal |
Propiedades de la cámara utilizadas para establecer la distancia focal. Selecciona una de las siguientes opciones: § Longitud focal y ancho del sensor. § Distancia focal y tamaño de píxel § Distancia focal 35 |
|
Ancho del sensor |
Tamaño del sensor de la cámara en milímetros. |
|
Pixel Tamaño |
Tamaño de un píxel físico en el sensor de la cámara en milímetros. |
|
Longitud focal |
Distancia focal en milímetros. |
|
Distancia focal 35 |
Distancia focal equivalente en milímetros para una cámara de película de 35 mm. |
|
Punto de referencia principal |
Origen y unidades del punto principal. Seleccione uno de los siguientes: § Arriba a la izquierda en píxeles: la dirección x positiva es hacia la derecha y la dirección y positiva es hacia abajo. § Arriba a la izquierda en mm: la dirección x positiva es hacia la derecha y la dirección y positiva es hacia abajo. § Centro en píxeles: la dirección x positiva es hacia la derecha y la dirección y positiva es hacia arriba. § Centro en mm: la dirección x positiva es hacia la derecha y la dirección y positiva es hacia arriba. |
|
Punto principal X |
Valor X del punto principal en píxeles o mm según la referencia del punto principal. |
|
Punto principal Y |
Valor Y del punto principal en píxeles o mm según la referencia del punto principal. |
|
Ancho |
Ancho de la foto en píxeles. |
|
Altura |
Alto de la foto en píxeles. |
|
Gama |
Brillo de los colores de la foto. El valor predeterminado de 1 deja el color sin cambios. Los valores >1 iluminan los colores, mientras que los valores <1 los oscurecen. |
|
Distancia máxima desde la posición de la cámara para qué información fotográfica se considera válida para la aerotriangulación. |
|
|
Rango efectivo calculado |
Siempre que no se proporcione el valor del parámetro Rango efectivo, PhotoMesh calcula la distancia máxima desde la cámara para la cual la información fotográfica se considera válida para la aerotriangulación y luego muestra y utiliza este valor. |
|
Área de cultivo |
Porcentaje de la foto a utilizar en el proyecto. Las áreas borrosas u obstruidas en los bordes de una foto se recortarán según el valor de esta propiedad. |
|
Uso en modelo texturizado |
Seleccione la casilla de verificación para incluir esta colección en el modelo texturizado. |
|
Uso en ortofoto |
Seleccione la casilla de verificación para incluir esta colección en la ortofoto. |
|
Usar solo como referencia |
Seleccione la casilla de verificación para incluir esta colección solo en el proyecto de referencia. See "Agregar un proyecto de referencia para usar en aerotriangulación" en el capítulo "Puntos de control" para obtener información. |
|
Uso en nube de puntos |
Seleccione la casilla de verificación para incluir esta colección en la salida de la nube de puntos. |
|
Bandas – Multiespectrales Nota: : La información de la banda se recupera de la información de la colección en la lista de fotos Excel o XML, el XML de propiedades de la colección o de la primera foto de la colección. See "Cargando un archivo de lista de fotos" y "Cargando archivos de fotos desde el disco" en el capítulo "Administración de fotografías". Puede configurar manualmente el valor para cada banda en la hoja de propiedades. |
|
|
Bandas multiespectrales |
Bandas multiespectrales en las fotografías de la colección. Estas bandas se pueden utilizar para texturizar el modelo 3D y generar la ortofoto. See "Configuración de parámetros de reconstrucción avanzados" en el capítulo "Construcción". |
|
1 |
Seleccione la primera banda. |
|
2 |
Seleccione la segunda banda. |
|
3 |
Seleccione la tercera banda. |
|
Distorsión de la cámara (opcional) Distorsión radial y tangencial calculada mediante el modelo de Brown-Conrady. Ver aquí para obtener más información. Línea cuenta con opciones en español. |
|
|
K1 |
Define el 1st coeficiente de distorsión radial. |
|
K2 |
Define el 2nd coeficiente de distorsión radial. |
|
K3 |
Define el 3rd coeficiente de distorsión radial. |
|
P1 |
Define el 1st coeficiente de distorsión tangencial. |
|
P2 |
Define el 2nd coeficiente de distorsión tangencial. |
|
Posición avanzada (Se mostrarán los valores de compensación y giro OPK o YPR, dependiendo de su selección anterior para Método de orientación) |
|
|
Compensación de altitud |
Desplazamiento del valor de altitud actual. |
|
Compensación omega |
Desplazamiento en grados a lo largo del eje Omega desde el ángulo proporcionado en la foto. Aplicada antes de cualquier rotación adicional y antes de calcular la posición/orientación, esta propiedad ayuda a corregir las discrepancias de orientación entre una cámara y el plano en el que está montada. |
|
Compensación de phi |
Desplazamiento en grados a lo largo del eje Phi desde el ángulo proporcionado en la foto. Aplicada antes de cualquier rotación adicional y antes de calcular la posición/orientación, esta propiedad ayuda a corregir las discrepancias de orientación entre una cámara y el plano en el que está montada. |
|
Compensación Kappa |
Desplazamiento en grados a lo largo del eje Kappa desde el ángulo proporcionado en la foto. Aplicada antes de cualquier rotación adicional y antes de calcular la posición/orientación, esta propiedad ayuda a corregir las discrepancias de orientación entre una cámara y el plano en el que está montada. |
|
Compensación de guiñada |
Desplazamiento en grados a lo largo del eje de guiñada desde el ángulo proporcionado en la foto. Aplicada antes de cualquier rotación adicional y antes de calcular la posición/orientación, esta propiedad ayuda a corregir las discrepancias de orientación entre una cámara y el plano en el que está montada. |
|
Compensación de tono |
Desplazamiento en grados a lo largo del eje de paso desde el ángulo proporcionado por la foto. Aplicada antes de cualquier rotación adicional y antes de calcular la posición/orientación, esta propiedad ayuda a corregir las discrepancias de orientación entre una cámara y el plano en el que está montada. |
|
Desplazamiento de rollo |
Desplazamiento en grados a lo largo del eje Roll desde el ángulo proporcionado en la foto. Aplicada antes de cualquier rotación adicional y antes de calcular la posición/orientación, esta propiedad ayuda a corregir las discrepancias de orientación entre una cámara y el plano en el que está montada. |
|
Voltear Omega |
Invierte el eje Omega. |
|
Voltear Phi |
Invierte el eje Phi. |
|
Flip Kappa |
Invierte el eje Kappa. |
|
Girar guiñada |
Rotación adicional a lo largo del eje Yaw en grados, que se realiza en orden YPR después de aplicar la orientación OPK o YPR y las compensaciones de las fotos. |
|
Girar paso |
Rotación adicional a lo largo del eje de paso en grados, que se realiza en orden YPR después de que se aplicaron las compensaciones y la orientación OPK o YPR de las fotos. |
|
Girar rollo |
Rotación adicional a lo largo del eje Roll en grados, que se realiza en orden YPR después de aplicar la orientación OPK o YPR y las compensaciones de las fotos. |
|
Nota: La opción "Usar configuración de compilación" para las propiedades siguientes establece el valor de precisión según la configuración de compilación del proyecto. Para obtener más información sobre esta y otras opciones de parámetros de precisión, ver "Configuración de parámetros avanzados de aerotriangulación" en el capítulo "Construcción" para obtener información. |
|
|
Ignorar orientación |
Ignore el valor de orientación. |
|
Factor de precisión horizontal |
Peso para asignar a las coordenadas XY proporcionadas por las fotos para determinar los valores XY calculados. Esto varía desde Muy alto - AT externo (Factor = 100) hasta No confiable (Factor = 0). |
|
Factor de precisión vertical |
Peso para asignar a la altitud proporcionada por las fotos para determinar el valor de altitud calculado. Esto varía desde Muy alto – AT externo (Factor = 100) hasta No confiable (Factor = 0). |
|
Precisión de longitud focal |
Un porcentaje que indica la desviación permitida del valor de distancia focal proporcionado al calcular el AT. Esto representa la precisión de la distancia focal proporcionada. Esto varía desde Usar valor de entrada hasta No confiable. |
|
Precisión del punto principal |
Un porcentaje que indica la desviación permitida del punto principal proporcionado al calcular el AT. Esto representa la precisión del punto principal proporcionado. Esto varía desde Usar valor de entrada hasta No confiable. |
|
Precisión radial |
Precisión radial. Generalmente se recomienda seleccionar la opción "Estándar". Si sus datos fueron capturados con una cámara profesional que aplicó automáticamente una corrección de distorsión radial (es decir, el valor de distorsión original es extremadamente preciso), seleccione "Usar valor de entrada". |
|
Precisión tangencial |
Precisión tangencial. Generalmente se recomienda seleccionar la opción "Estándar". Si sus datos fueron capturados con una cámara profesional que aplicó automáticamente una corrección de distorsión tangencial (es decir, el valor de distorsión original es extremadamente preciso), seleccione "Usar valor de entrada". |
|
Calcular los parámetros de la cámara |
Método de cálculo de los parámetros intrínsecos de la cámara. § Usar configuración de compilación: use el método seleccionado en "Calcular parámetros de cámara" En el parámetro de construcción. § Colección completa: calcule el AT para que las propiedades intrínsecas de la cámara sean las mismas para todas las fotografías de la colección. § Por foto: calcula los elementos intrínsecos de la cámara individualmente para cada foto de la colección. Nota: Los parámetros deben calcularse por fotografía cuando no todas las fotografías de una colección fueron tomadas con la misma cámara física con idéntica distancia focal y punto principal. |
Lista de colecciones
En la lista Colecciones, puede ver las propiedades de la colección. Estas propiedades se pueden editar en el Hoja de propiedades de colección. See "Acerca de la lista de artículos" en el capítulo "Uso del árbol de proyectos y la lista de elementos" para obtener información sobre cómo trabajar con la lista de colecciones.

Lista de colecciones
Para abrir la lista de Colecciones:
§ En la sección Árbol del proyecto, Haga click en el botón Galería de fotos grupo. La lista de Fotos se muestra mostrando dos pestañas. Haga clic en la pestaña Colecciones. La lista Colecciones enumera todas las colecciones del proyecto, con la siguiente información/opciones:
|
Propiedad |
Descripción |
|
Selección |
Seleccione la colección sobre la que realizar una acción. |
|
Visible |
Seleccione la casilla de verificación para mostrar la colección en la ventana 3D. |
|
Excluir |
Seleccione la casilla de verificación para excluir la colección del proyecto. |
|
Nombre |
Nombre de la colección de fotografías. |
|
Número de Fotos |
Número de fotografías de la colección. |
|
Ancho del sensor |
Tamaño del sensor de la cámara en milímetros. |
|
Pixel Tamaño |
Tamaño de un píxel físico en el sensor de la cámara en milímetros. |
|
Longitud focal |
Distancia focal en milímetros. |
|
Distancia focal 35 |
Distancia focal equivalente en milímetros para una cámara de película de 35 mm. |
|
Ancho |
Ancho de las fotografías en píxeles. |
|
Altura |
Altura de las fotos en píxeles. |
|
Punto principal X |
Valor X del punto principal en píxeles o mm según la referencia del punto principal. |
|
Punto principal Y |
Valor Y del punto principal en píxeles o mm según la referencia del punto principal. |
|
Compensación de altitud |
Desplazamiento del valor de altitud actual. |
|
Compensación omega |
Desplazamiento a lo largo del eje Omega en grados. |
|
Compensación de phi |
Desplazamiento a lo largo del eje Phi en grados. |
|
Compensación Kappa |
Desplazamiento a lo largo del eje Kappa en grados. |
|
Precisión horizontal |
Precisión de las coordenadas X e Y proporcionadas por la foto. |
|
Precisión vertical |
Precisión de la altitud proporcionada por la foto. |
|
Precisión de longitud focal |
Precisión de la distancia focal introducida por la cámara. |
Lista de Fotos
En la lista Fotos, puede ver y configurar las propiedades de las fotografías, así como establecer la visibilidad y la inclusión de las fotografías en el proyecto. Cuando se muestran las posiciones calculadas de la cámara, también puede ver la información de propiedad calculada para una foto seleccionada. See "Acerca de la lista de artículos" en el capítulo "Uso del árbol de proyectos y la lista de elementos" para obtener información sobre cómo trabajar con la lista de fotos.
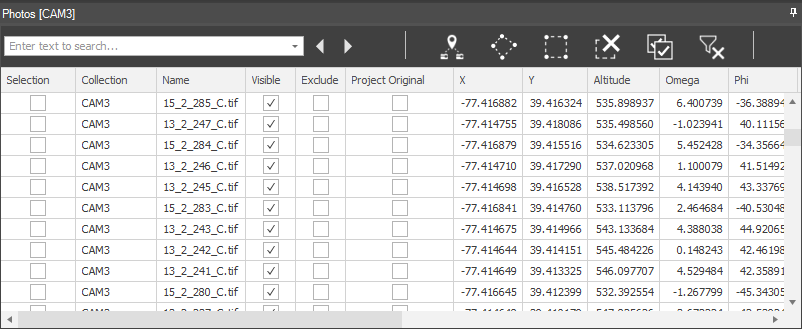
Lista de fotos
Para abrir la lista de Fotos:
§ En la sección Árbol del proyecto, Haga click en el botón Galería de fotos grupo. La lista de Fotos se muestra mostrando dos pestañas. Haga clic en la lista de Fotos para ver una lista de todos los archivos de fotos del proyecto, con la siguiente información/opciones:
|
Propiedad |
Descripción |
|
Selección |
Seleccione las fotografías en las que realizar una acción, por ejemplo, crear un punto de enlace, mostrar/ocultar el símbolo de la cámara, excluir, eliminar. |
|
Colecciones |
Nombre de la colección de fotografías (Solo lectura). |
|
Nombre |
Nombre de la foto. |
|
Visible |
Seleccione la casilla de verificación para mostrar la foto en la ventana 3D. |
|
Excluir |
Seleccione la casilla de verificación para excluir la foto del proyecto. Esta opción no está disponible en el modo Revisión. |
|
Proyecto Original |
Seleccione la casilla de verificación para proyectar la foto en el terreno en la posición de cámara proporcionada. Se puede proyectar una foto en el terreno para ver si se ajusta a las imágenes del terreno o para comprender mejor la posición de la foto. Sólo se pueden proyectar fotografías que tengan información de posicionamiento (coordenadas XY y altitud) y orientación (Omega, Phi y Kappa). Nota: Proyectar varias fotografías simultáneamente puede llevar varios minutos. |
|
X |
Coordenada este-oeste de la cámara. (Requerido) |
|
Y |
Coordenada norte-sur de la cámara. (Requerido) |
|
Altitud |
Altitud de la cámara en metros. (Requerido) |
|
Omega |
Ángulo omega de Euler en grados. |
|
Fi |
Ángulo de Phi Euler en grados. |
|
kappa |
Ángulo kappa de Euler en grados. |
|
Guiñada |
Ángulo de dirección de la cámara a lo largo del eje vertical con respecto al norte. |
|
Paso |
Ángulo de inclinación de la cámara a lo largo de su eje lateral con respecto al horizonte. |
|
Rodar |
Ángulo de giro de la cámara a lo largo de su eje longitudinal (de adelante hacia atrás). |
|
Path |
Ruta completa de la foto. |
|
K1 |
Define el 1st coeficiente de distorsión radial. |
|
K2 |
Define el 2nd coeficiente de distorsión radial. |
|
K3 |
Define el 3rd coeficiente de distorsión radial. |
|
P1 |
Define el 1st coeficiente de distorsión tangencial. |
|
P2 |
Define el 2nd coeficiente de distorsión tangencial. |
|
Información de posición cameral calculada (Columnas adicionales) Nota: Si desea ver información calculada para una foto seleccionada, haga clic en el Calculado botón de la Azulejo y . |
|
|
Proyecto calculado |
Seleccione la casilla de verificación para proyectar la foto en el terreno en la posición calculada de la cámara. |
|
Error medio |
Mediana de los errores de triangulación de todas las entidades de la foto. El error de triangulación es la distancia, en píxeles, para cada una de las características de la foto, entre la característica identificada automáticamente y su posición de triangulación proyectada. |
|
X Calculado |
Coordenada este-oeste calculada de la cámara. |
|
Calculado |
Coordenada norte-sur calculada de la cámara. |
|
Altitud calculada |
Altitud calculada de la cámara en metros. |
|
Omega calculado |
Ángulo de Omega Euler calculado en grados. |
|
Fi calculada |
Ángulo de Phi Euler calculado en grados. |
|
Kappa calculado |
Ángulo de Kappa Euler calculado en grados. |
|
K1 calculado |
Calculado 1st coeficiente de distorsión radial. |
|
K2 calculado |
Calculado 2nd coeficiente de distorsión radial. |
|
K3 calculado |
Calculado 3rd coeficiente de distorsión radial. |
|
P1 calculado |
Calculado 1st coeficiente de distorsión tangencial. |
|
P2 calculado |
Calculado 2nd coeficiente de distorsión tangencial. |